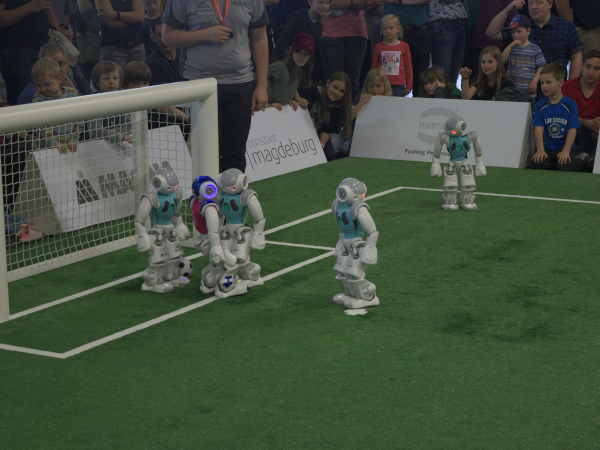
Rules like in a real soccer game ?
The soccer field of the "Standard Platform League" is 9×6 meters. In each game, two robot teams compete against each other, playing completely independently. The programmers can only watch and cheer on their own robots! As in a real soccer game, rules are controlled and enforced by human referees – although the rules of robot soccer in the Standard Platform League are not equivalent to those in soccer played by humans. The most common foul is "pushing," the jostling of opposing robots, which is punishable by a time penalty or free kick.
The rules are made more difficult every year to get closer to the long-term goal of programming a robot team that can win against the FIFA World Champion by 2050.